PIV システム

粒子画像速度測定法 (PIV)
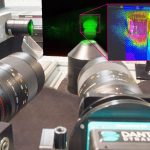
粒子画像速度測定法(PIV)は、流速、乱れ、マイクロ流体、噴霧及び燃焼過程などの研究と解析のための非接触レーザ光学計測手法です。
弊社は、多様な研究ニーズに即するDantec Dynamics社製の幅広いPIVソリューションをご案内しています。基本システムは、1台のカメラによって平面2次元の計測を行います。より高度なシステムでは、複数台のカメラによって平面ステレオ3次元及びボリュームでの3次元計測を行います。
高速度システムでは渦度の解析を可能とします。さらに、不確かさの予測など測定のクオリティの向上を図る機能や、渦度の検出のためのポスト処理機能、PIVとLIFやシャドウ法との組み合わせ、圧力の計算など多くの機能の追加が可能です。
|
粒子画像流速測定法(PIV)は、流れの断面で瞬間的な速度ベクトル測定を提供する全流れ場技術です。
詳細はここをクリック |
PIVソリューション

FlexPIV 1Mシステムは、少領域から中程度の領域までの照明としての65mJ@15Hzデュアルキャビティレーザと、高感度FlowSense GigE 1.3MピクセルCCDカメラ及び35㎜ F2.1レンズから構成されています。 |
|
面内での速度2成分 (2D2C) 、または3成分など、多彩なラインナップがあります。一般的なステレオPIVシステム等になります。 |
|
面内・立体PIVでは、この3次元の挙動を測定できないことが多いです。 体積速度測定法 (VV) の最新のDynamicStudioのアドオンにより、流れの3次元特性を測定できるようになりました。 |
|
マイクロ流体力学は、MEMSや、ラボオンチップシステム、他のマイクロ流体力学デバイスなどの用途でマイクロチャネル内の流れに焦点を当てた急成長中の研究分野です。MicroPIVやMicroLIFを含むいくつかの手法は、ミクロンスケールの分解能で速度、温度、濃度、液滴径、pHを測定するために応用することができます。 |
|
水中立体PIV (2D3C) ソリューションにより、曳航水槽や他の水中用途で効率的に流れ場を測定できます。当ソリューションは、船体、プロペラ、海上工事など、流体力学分野の応用について研究するために世界的に使用されています。 |
|
EduPIVシステムは、学生の方々にPIV手法を紹介するための、安全でお手頃価格のターンキーソリューションです。当システムには、操作が簡単で、優れた信頼性と性能も兼ね備えた、LED電球使用の照明源を採用しています。 |