
はじめに
粒子画像速度測定法 (PIV) は、流れの断面における速度ベクトルを瞬時に測定する、流れ場全体のための手法です。測定する速度成分は2つですが、立体手法の使用により、3つの速度成分をすべて記録することができ、その結果、全領域の3次元速度ベクトルを瞬時に取得することができます。最新のデジタルカメラと専用コンピュータハードウェアを使用することで、リアルタイムの速度マップが得られます。
特徴
- 非侵襲的な手法、流れに沿ったミクロンサイズの粒子の速度を測定。
- ゼロから超音速までの速度範囲。
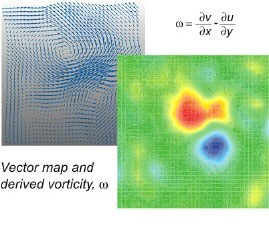
- 流れの断面において速度ベクトルマップを瞬時に取得。
- 立体配置を使用して3つの速度成分すべての情報を入手可能。
- 速度ベクトルマップのシーケンスによる統計や、空間相関、他の関連データが利用可能。
測定結果は、数値計算流体力学、すなわちラージエディ シミュレーションに類似しており、リアルタイムの速度マップは流体力学研究者にとって貴重なツールとなっています。
原理
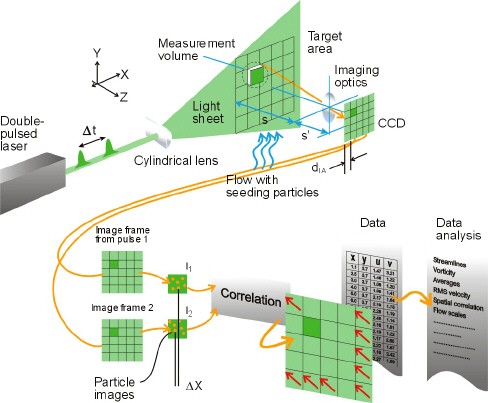
PIVでは、以下のように、2回の光パルス間の粒子の挙動を測定することによって、速度ベクトルが、粒子種の流れの標的領域内の微小区間から導出されます。
![]()
標的領域の流れにライトシートが照射されます。カメラのレンズは、デジタルカメラのセンサーアレイに標的領域を撮像します。カメラは、個別の画像フレームに各光パルスを撮影することができます。
2回の光パルスのシーケンスが録画されると、その画像は、微小領域 (IA) と呼ばれる微小区間に分割されます。各画像フレームからの微小領域I1とI2は、ピクセルごとに相互相関しています。
この相互相関により、信号のピークが生成され、共通の粒子変位DXが特定されます。変位、したがって速度も、サブピクセル補間によって正確に測定されます。
標的領域全体の速度ベクトルマップは、カメラで撮影された2枚の画像フレーム上の各微小領域の相互相関を繰り返すことで取得されます。

PIVの画像は視覚的なものであるため、粒子種の挙動を追跡するのみ
粒子の挙動を追跡するために同じ画像フレームに両方の光パルスを録画することによって、流れの構造を明確に視覚的に認識することができます。気流中では、種粒子は通常、1 μm~5 μmの範囲の油滴です。
液流の用途では、種粒子は通常、5 μm~100 μmの範囲のポリスチレン球、ポリアミド球または中空状ガラス球です。流れの速度で良好に流され、またカメラで撮影できる十分な光を散乱させる任意の粒子を使用することができます。
流れの中の粒子の数は、相互相関で良好な信号ピークを得るために重要です。だいたいの目安として、10〜25枚の粒子画像が各微小領域内で表示されるべきです。

微小領域の大きさ、撮像倍率およびライトシートの厚さが判明していれば、測定体積を定義することができます。
空間分解能とダイナミックレンジ
PIVの測定装置を配備するには,微小領域の側面長dIAと撮影倍率s’/sと、測定する流れ構造体の大きさとのバランスがとれている必要があります。これを示す方法の1つは、以下のように、流速勾配を微小領域内に収まる程度に小さくする必要があることです。
![]()
測定可能な最大速度は、時間Dt内に微小領域の大きさを超えて移動する粒子によって制約されます。その結果、2枚の画像フレーム間の相互相関が失われ、したがって速度情報も失われることになります。だいたいの目安は以下のとおりです。
![]()
3つ目の速度成分
普通のPIVシステムでは、3つ目の速度成分は、撮像の形状のために見ることができません。この3つ目の速度成分は、2台のカメラを立体配置して使用することで導き出すことができます。
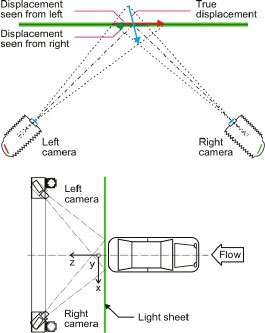
自動車模型の後方の流れの立体PIV測定のための実験用セットアップ。
![]()